Home
Research
Research Areas
Research Areas
Flight Dynamics & Control Laboratory
Supervisor
Kim, You Dan
- 02-880-7392
- Bd.302 R.318-2
- http://fdcl.snu.ac.kr/
Research Area
Intelligent integrated flight control system design, Vision-based Autonomous UAV, Cooperative control of multiple UAVs, Guidance and control of flight vehicles, Trajectory optimization

Laboratory for Autonomous Robotics Research
Supervisor
Kim, Hyoun Jin
- 02-880-1552
- Bd.300 R.504
- http://larr.snu.ac.kr
Research Area
Intelligent Control Systems Laboratory (ICSL) is a one of the leading laboratories dedicated to advancing robotics and automation technology for better human life. Led by Professor H. Jin Kim from the Department of Mechanical and Aerospace Engineering, ICSL is currently focusing on various research areas including
- Autonomous systems : Unmanned aerial vehicles, Unmanned ground vehicles, Robotic manipulation, Biomimetic robots, etc.
- Multi-robot coordination : Task assignment, Path planning, and Decision making in multi-agent systems
- Missile guidance, navigation, and control
- Computer vision for robotic operations
- Machine learning for intelligent automation
By combining cutting-edge algorithms with practical experiences, ICSL strives to develop more intelligent and adaptive systems for contributing to a greater quality of life.

Navigation & Electronic System Laboratory
Supervisor
Park, Chan Gook
- 02-880-1732
- Bd.133 R.607
- http://nesl.snu.ac.kr/
Research Area
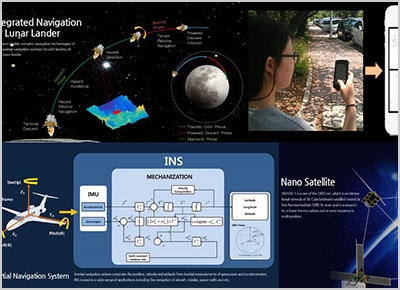
NESL has been researching the field of inertial navigation system for the last 20 years. Inertial navigation system has the benefit of being able to obtain the position, velocity, and attitude of a vehicle with the outputs of gyroscopes and accelerometers alone. In case of pure inertial navigation, the navigation solution diverges due to various error factors. To compensate for these shortcomings, high-precision aided inertial navigation using GNSS, database, visual sensors, star sensors, sun sensors, and, in the case of pedestrian navigation, the characteristics of a user’s movement, etc. has been researched. In addition, we are working on data fusion technologies incorporating such various sensors, and also on making systems more reliable through anti-jamming and anti–spoofing, and fault detection.
Research Field
- Estimation Theory
- Inertial Navigation System(INS)
- Terrain Referenced Navigation(TRN)
- Image Based Navigation(IBN)
- Anti-Jamming, Anti-Spoofing Algorithm
- Multi-sensor(INS/GNSS/TRN/IBN) Fusion Algorithm
- Fault Detection and Isolation Algorithm
- Pedestrian Dead Reckoning System
- Space Navigation
Research Field
- Estimation Theory
- Inertial Navigation System(INS)
- Terrain Referenced Navigation(TRN)
- Image Based Navigation(IBN)
- Anti-Jamming, Anti-Spoofing Algorithm
- Multi-sensor(INS/GNSS/TRN/IBN) Fusion Algorithm
- Fault Detection and Isolation Algorithm
- Pedestrian Dead Reckoning System
- Space Navigation
Satellite Navigation Laboratory
Supervisor
Kee, Chang Don
- 02-880-8918, 8052
- Bd.302 R.418-2, Bd.312 R.501
- http://gnss.snu.ac.kr
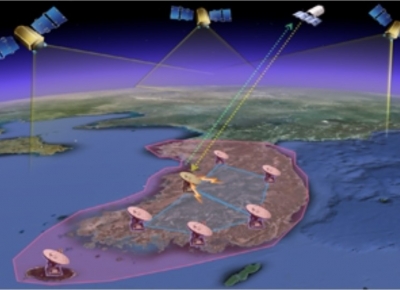
Research Area
Research area includes GNSS based positioning, navigation and timing, UAV, cube satellite, and smart land vehicle. Practical applications as well as core algorithms of GNSS augmentation system such as WADGPS (Wide-Area Differential GPS) and WARTK (Wide-Area Real Time Kinematic) for cm-level accuracy, are being developed. Also hardware and software GNSS receiver are developed and used in indoor navigation system and in development of the future navigation system. We demonstrated a single GPS antenna based UAV attitude determination and control system 1st in the world, and pseudolite-based indoor navigation system 2nd in the world. Research on drone and land vehicle navigation system for urban area using GPS/INS integration is currently conducted, and also SNUGLITE, a cube satellite, is being built in the lab and will be launched in 2018.